
This quick manual with guide you to integrate North's RTKite System-on-Module GNSS RTK receiver to operate as the main GPS for 3DR's Pixhawk autopilot module.
I. Interfase.
The Pixhawk uses TTL 3.3V as logic for serial COM ports.

The RTKite receiver works with either Serial RS232 or TTL 3.3V. If you are going to use the RTKite receiver only with the Pixhawk module, we recommend you to order it directly on this version.
If you order the RTKite with Serial RS232 logic and want to use it with the Pixhawk, you could either put a RS232 to TTL 3.3V converter or convert the RTKite to TTL 3.3V logic with the following easy steps:
II.- Pinout.
The details of Pixhawk's Pinout are on its support site: https://pixhawk.org/modules/pixhawk#pinouts
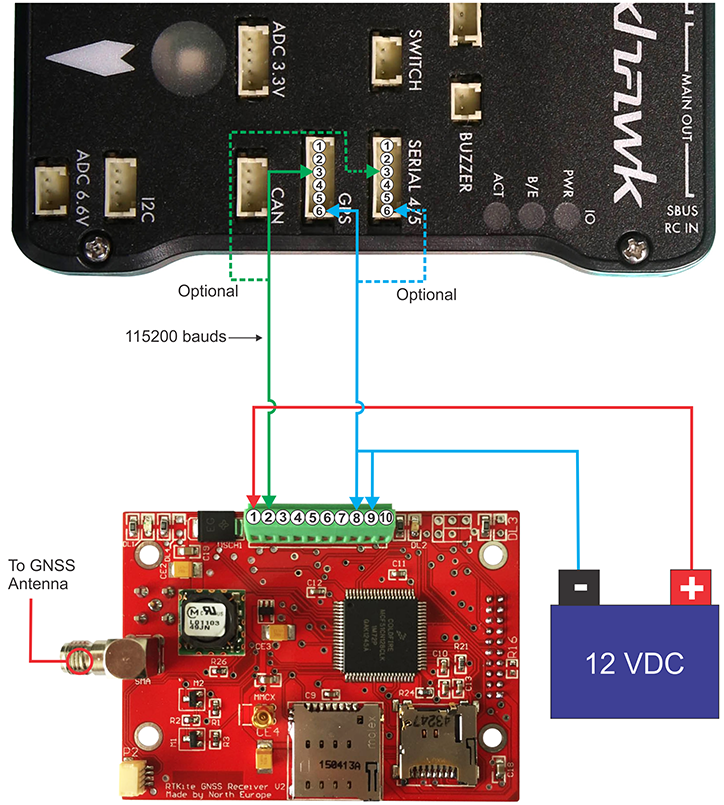
The RTKite is to be connected on the same ports used for regular GPS receivers, it can be the Pixhawk "GPS" port or the "Serial 4/5" Port.
Pixhawk's Pinout
| GPS Port | ||
| Pin | Signal | Volt |
| 3 (blk) | Rx (IN) | +3.3V |
| 6 (blk) | GND | GND |
| Serial 4/5 Port (Optional) | ||
| Pin | Signal | Volt |
| 3 (blk) | Rx (IN) | +3.3V |
| 6 (blk) | GND | GND |
RTKite's Pinout
| RTKite String Port | ||
| Pin | Signal | Volt |
| 2 | Tx (OUT) | +3.3V |
| 8 and 9 | GND | GND |
In RTKite the data output is on Pin2 at 115,200 baud.
The interconnection between both modules is:
| RTKite V2 | Pixhawk |
| PIN 2 | PIN 3 |
| PIN 8, 9 | PIN 6 |
III.- RTKite setup.
Use the SmartOS Config Android application and connect to the RTKite using the steps for CONFIGURATION.
On the RTKite Menu, select the Output mode: "5Hz Ardupilot NMEA" and press "Set RTKite Mode".

IV.- Pixhawk setup.
In order to work properly with RTK receivers, the Arudupilot code must me updated.
Firstly download the custom XXXXXXXXX
The integration with Pixhawk is now complete.